在工业自动化领域,机器人抓手的稳定性和可靠性直接决定产线效率。为应对不规则物件抓取难题,盟立自主研发了一款创新型机器人专用抓手,融合仿形抓取与真空吸附技术,以“双检测”为核心,助力企业实现高效、安全的自动化生产。
盟立技术创新:双检测保障抓取安全
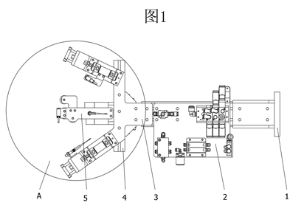
此次推出的一种机器人取放物件的专用抓手由盟立技术团队设计,包含机器人连接块、延伸臂、气缸驱动系统、吸盘模块及自调角度支撑件等核心组件。其最大亮点在于“双检测”机制——通过光电开关实时监控吸盘吸附状态与气缸夹紧动作,确保每次抓取精准到位。即使某一检测元件异常,系统仍可依靠另一检测模块维持运转,避免因设备故障导致产线停摆,彰显盟立 以“技术护航生产”的理念。
核心优势:稳定抓取与柔性适配
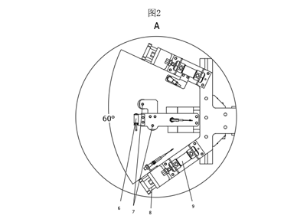
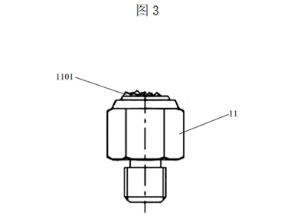
针对复杂工件,盟立的专用抓手采用“固定+移动”仿形抓手组合设计。两侧气缸以60°夹角对称布局,配合导向杆驱动移动抓手,实现快速夹紧;中央固定抓手与吸盘协同作业,可自适应不同轮廓的物件。值得一提的是,抓取面搭载的自调角度支撑件采用外六角螺丝结构,表面防摩擦纹路设计大幅降低工件滑脱风险,进一步提升了抓取稳定性。
赋能行业:助力智能制造升级
该抓手已成功应用于汽车零部件等行业的精密装配场景。例如,在汽车零部件抓取中,吸盘模块可精准吸附曲面工件,仿形抓手则通过柔性夹持避免划伤;而在汽车零部件的搬运中,双检测机制有效解决了传统抓手因信号误判导致的漏抓问题。盟立集团通过持续迭代技术方案,为客户提供高兼容性、低维护成本的自动化装备,助力企业降本增效。
盟立愿景:以智能装备驱动未来
作为自动化领域的领军企业,盟立始终聚焦技术创新与场景落地。此次专用抓手的推出,不仅体现了其在机器人末端执行器领域的深厚积累,更展现了以用户需求为导向的研发策略。未来,盟立将继续深耕智能制造,为客户提供更智能、更可靠的工业自动化解决方案,携手行业迈向数字化新时代。
在工业自动化领域,机器人抓手的稳定性和可靠性直接决定产线效率。为应对不规则物件抓取难题,盟立自主研发了一款创新型机器人专用抓手,融合仿形抓取与真空吸附技术,以“双检测”为核心,助力企业实现高效、安全的自动化生产。
盟立技术创新:双检测保障抓取安全
此次推出的一种机器人取放物件的专用抓手由盟立技术团队设计,包含机器人连接块、延伸臂、气缸驱动系统、吸盘模块及自调角度支撑件等核心组件。其最大亮点在于“双检测”机制——通过光电开关实时监控吸盘吸附状态与气缸夹紧动作,确保每次抓取精准到位。即使某一检测元件异常,系统仍可依靠另一检测模块维持运转,避免因设备故障导致产线停摆,彰显盟立 以“技术护航生产”的理念。
核心优势:稳定抓取与柔性适配
针对复杂工件,盟立的专用抓手采用“固定+移动”仿形抓手组合设计。两侧气缸以60°夹角对称布局,配合导向杆驱动移动抓手,实现快速夹紧;中央固定抓手与吸盘协同作业,可自适应不同轮廓的物件。值得一提的是,抓取面搭载的自调角度支撑件采用外六角螺丝结构,表面防摩擦纹路设计大幅降低工件滑脱风险,进一步提升了抓取稳定性。
赋能行业:助力智能制造升级
该抓手已成功应用于汽车零部件等行业的精密装配场景。例如,在汽车零部件抓取中,吸盘模块可精准吸附曲面工件,仿形抓手则通过柔性夹持避免划伤;而在汽车零部件的搬运中,双检测机制有效解决了传统抓手因信号误判导致的漏抓问题。盟立集团通过持续迭代技术方案,为客户提供高兼容性、低维护成本的自动化装备,助力企业降本增效。
盟立愿景:以智能装备驱动未来
作为自动化领域的领军企业,盟立始终聚焦技术创新与场景落地。此次专用抓手的推出,不仅体现了其在机器人末端执行器领域的深厚积累,更展现了以用户需求为导向的研发策略。未来,盟立将继续深耕智能制造,为客户提供更智能、更可靠的工业自动化解决方案,携手行业迈向数字化新时代。